



INTRODUCTION
Transforaminal lumbar interbody fusion (TLIF) is a well-established surgical technique for stabilizing and decompressing a spinal motion segment utilizing a unilateral facetectomy to access the disc space for implantation of a cage and/or bone graft [1,2]. It has become a routine operation performed through traditional open or minimally-invasive techniques and is associated with excellent outcomes in appropriately selected patients [3,4]. By now it is defined by many predetermined landmarks that help surgeons through the procedure [5]. Furthermore, image-guided spinal surgery (IGSS) leveraging 3-dimensional computer navigation has shown improvement in the accuracy of screw placement, especially in minimally-invasive surgeries (MIS) where traditional landmarks are not visualized [6-10].
Recently, IGSS has been supplemented by augmented reality (AR) [11]. AR is defined as an enhancement of the real world by computer-generated images projected onto the user’s field of view [11]. In this regard, AR can highlight anatomical structures relevant to the operation and artificially superimpose these structures onto the surgeon’s field of view during an operation. This projection can either be generated onto AR display headsets or directly into the surgical microscope via AR application software [11-13]. This technology can help surgeons identify crucial landmarks faster and with greater accuracy, especially in patients with complex anatomy or in revision cases [13].
This technology may be helpful for experienced surgeons when operating cases with challenging anatomical conditions like severe degenerative changes. Additionally, this technique offers enormous educational potential for novice surgeons and trainees. For example, MIS performed through tubular retractors are well established for treating herniated discs, lumbar stenosis, and performing TLIFs. These approaches offer very limited visualization through ports and carry a challenging learning curve given the lack of adjacent structures to use for anatomical reference. AR mitigates these issues through the display of crucial landmarks which can be displayed and identified even before they are seen in the microscopic field of view [14,15].
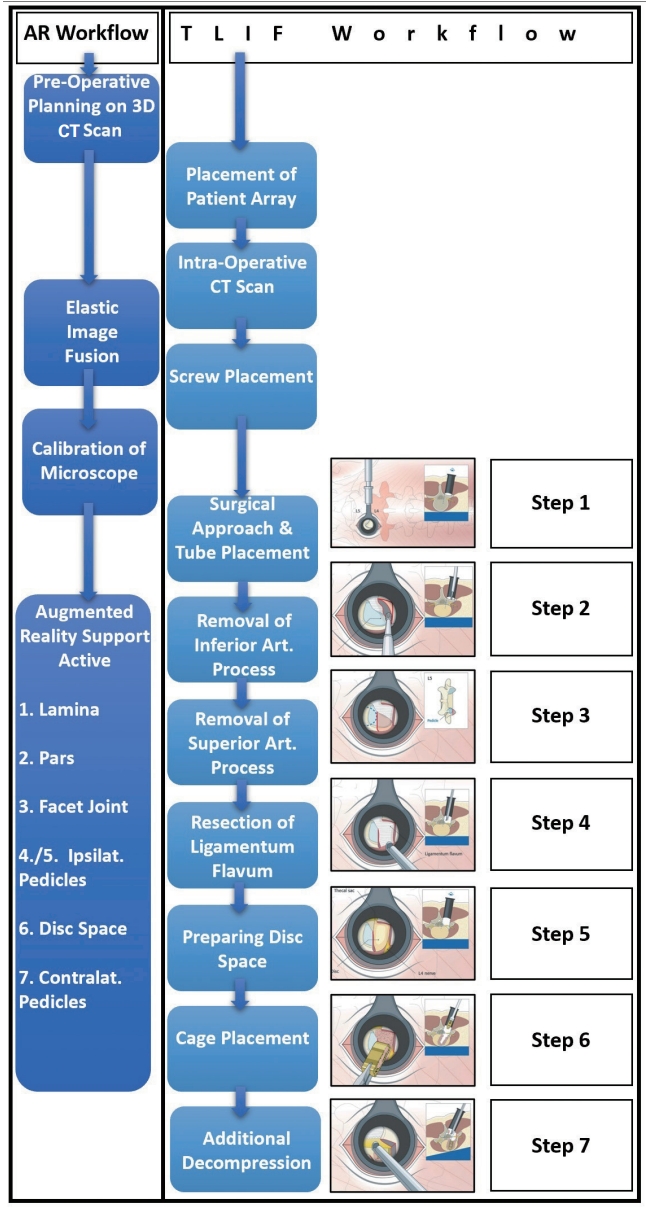
Tubular MIS-TLIF is a procedure that could particularly benefit from the application of AR and is based on reproducing a consistent procedural workflow guided by a series of fixed anatomical landmarks that can be difficult to visualize through an MIS approach [5]. The typical workflow steps for MIS-TLIF based on the AO Spine curriculum “Key steps in an MIS-TLIF procedure” are shown in Fig. 1 [5].
Facilitating the identification of the crucial anatomy and increasing the functional field of view for surgeons allows for the generation of step-by-step directions that could improve the procedure by streamlining the workflow during the surgery, reducing operative time and complication rates.
Here we present a technical report and workflow for the integration of AR and 3-dimensional (3D) navigation with the MIS-TLIF procedure highlighting important pearls and pitfalls. Our report is, to our knowledge, the first procedural description of a protocol to use AR for the MIS-TLIF procedure.
While the insertion of screws with 3D navigation or even with AR has been well described before, the use of AR for the identification of sequential surgical landmarks relevant to the other portions of the procedure is new and potentially very useful application of navigation and AR that expands the concept of our previously described idea of “total navigation” for spine cases [16].
MATERIALS AND METHODS
To evaluate the applicability of the tubular MIS-TLIF with AR support protocol, we performed a prospective case series of 10 patients. Baseline demographic data including age, sex, body mass index (BMI), American Society of Anesthesiologists (ASA) physical status classification grade. Perioperative data including blood loss operative time (measured from skin incision to skin closure), hospital length of stay, and complications were recorded. Patient-reported outcomes in the form of back and bilateral leg visual analogue scale scores before and after surgery were collected.
Exclusion criteria included nonelective (urgent or emergent) indication for surgery, presence of underlying malignant disease, and patient refusal. To avoid selection bias, after screening for exclusion criteria, randomization was performed using the digital randomizer “randomizer.org” to determine whether the patient would undergo surgery with AR [17]. Postoperatively, before hospital discharge, AP and lateral x-rays were performed. After each surgery, a subjective qualitative assessment was made by the surgeon whether the use of AR was helpful or not in this surgery and whether the surgeon subjectively believed that AR helped to shorten the surgery time.
1. Preoperative Planning
Planning was performed on a standard PC using Brainlab Elements software. The basis for the planning was the CT images available during the diagnostic work-up of the patient’s pathology and symptomology. No additional CT images were taken for the planning of the AR. The outlining was done using the "smart brush" function of the software, which, based on automatic algorithms, merges the structures outlined on 2-dimensional (2D) individual slides of the CT to create a 3D outline.
2. AR Integration With Intraoperative Imaging
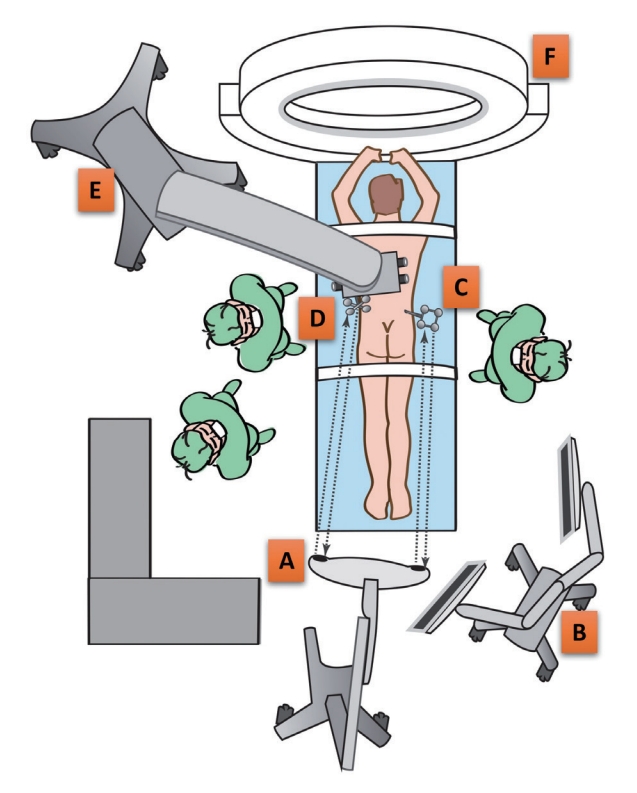
Preoperatively, AR planning was performed on a preoperative computed tomography (CT) scan using dedicated AR software (Brainlab Elements Smart Brush, Brainlab AG, Munich, Germany) which included anatomic landmarks and screw trajectories for the posterior instrumentation. All CT scans were already performed for diagnostic reasons and were not performed additionally for AR purposes, as to avoid additional radiation exposure to the patient. The operating rooms (ORs) were setup in the same manner as recommended for navigated cases (Fig. 2) [6].
The preoperative planning dataset was fused with the intraoperative navigation CT (AIRO, Brainlab AG, Munich, Germany) using elastic fusion software (Brainlab Curvature Correction) [18]. A digital correction was performed using this software to account for the difference in lumbar lordosis between the supine preoperative CT and the prone iCT [18].
The accuracy of the fusion was checked and approved before each use by an orthopedic surgeon who was not involved in the surgery. After approval of the fusion, the anatomical structures highlighted in the navigation software were projected into the surgical microscope (Zeiss Pentero, Carl Zeiss Meditec AG, Jena, Germany) via an AR module. Color and brightness were adjusted according to the preference of the surgeon.
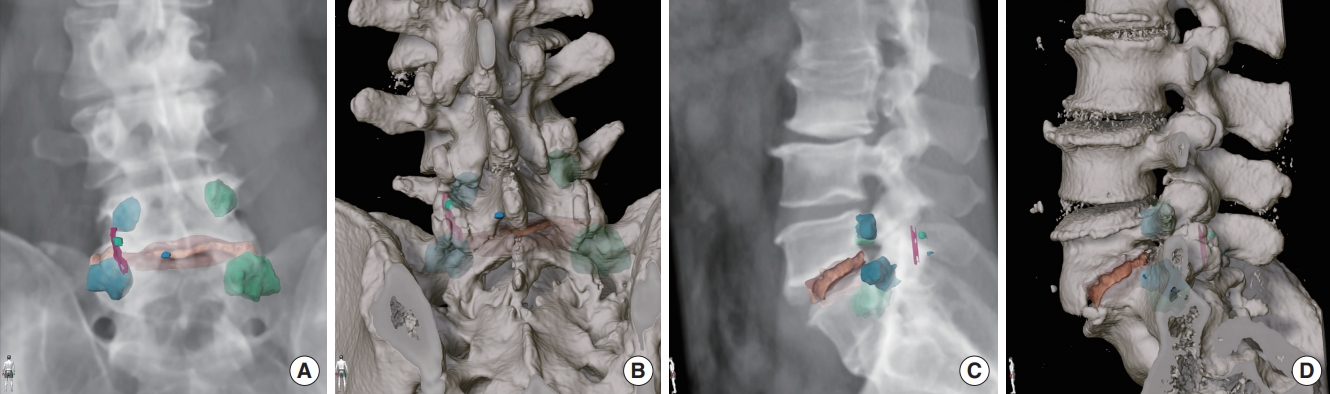
The following structures were marked for the TLIF procedure (Figs. 3, 4): (1) Inferior medial edge of the ipsilateral lamina, (2) ipsilateral Pars interarticularis (Pars), (3) ipsilateral superficial facet joint space, (4) ipsilateral pedicle of the caudal vertebra (IP), (5) disc space, (6) contralateral pedicles.
The contralateral pedicles and the pedicle of the upper ipsilateral vertebra were highlighted to allow better spatial orientation through the MIS tubular approach. Additionally, the entry points and trajectories for the pedicle screws were planned preoperatively.
To assess the accuracy of the navigation, the surgeon was asked to subjectively assess the precision of augmented reality, which was tested by probing structures marked by AR using a ball tip in the microscope. Potential deviation from the actual anatomical structure was verified in the microscope.
3. AR Integration With Microscopic Field of View
After placing a reference array on the patient’s iliac crest, an intraoperative navigation CT was performed. After confirmation of the image fusion by an orthopedic surgeon, the next step is the registration of the surgical microscope with the navigation software. A reference array is rigidly affixed to the surgical microscope and connected to the navigation system. After the navigation cameras detect the reference arrays on both the patient and the microscope, the scope is then calibrated to the patient (Fig. 5).
For this purpose, a reference array was attached to the surgical microscope at the standard mounting point and the microscope was connected to the navigation system using a cable. After successful detection of the reference arrays on the patient and on the microscope by the navigation cameras, the microscope was calibrated to the patient. After focusing the microscope on the patient’s reference array, the patient array is automatically detected by the system and had to be manually calibrated on the navigation device by adjusting the digital edges to match the actual position. After confirming the calibration, the elements marked for AR could be projected into the surgical microscope’s field of view.
4. Surgical Procedure
The MIS-TLIF was performed in the usual fashion outlined in the AO publication “step-by-step guide: key steps in MIS-TLIF procedure” [5]. The use of AR as an operative adjunct requires no changes to this procedure. In all cases, the procedure was performed in the prone position and under general anesthesia using our total navigation approach [16]. Before skin incision, a star reference array was placed on the iliac crest and a low-dose navigational CT scan was performed (Brainlab Airo). After the scan, navigated planning of the surgical approach was performed. In parallel, the digital fusion of the preoperative planning dataset with the intraoperative navigational CT was performed by the OR-team.
The skin incision and approach were made based on navigation approximately 4–5 cm paravertebrally. Next, navigation-guided percutaneous pedicle screws (DePuy/Synthes Viper Prime, Raynham, MA, USA) were placed using the preoperatively planned entry points [19]. This step is performed first as it is the most reliant on accurate navigation. An autologous bone graft for fusion was harvested from the iliac crest through the caudal most incision using standard technique. The navigation pointer was then used to find the optimal site and trajectory for the placement of a 21-mm tubular retractor.
After the positioning of the retractor, the surgical microscope was brought in and calibrated to the patient’s reference array (Fig. 5).
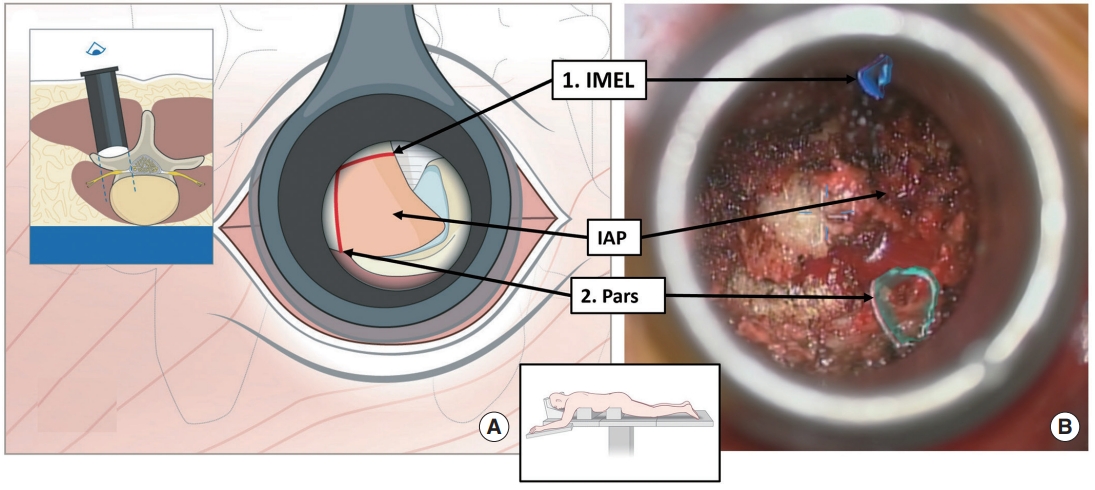
With successful calibration, the AR now becomes visible to the surgeon. With AR landmarks in view, soft tissue is dissected to the facet joint. The joint capsule is then visualized. After opening the joint capsule, the medial inferior border of the lamina marked by AR, and the marked Pars were presented as anatomical landmarks for resection of the inferior facet and the accuracy of the AR was verified using a navigated pointer (Fig. 6).
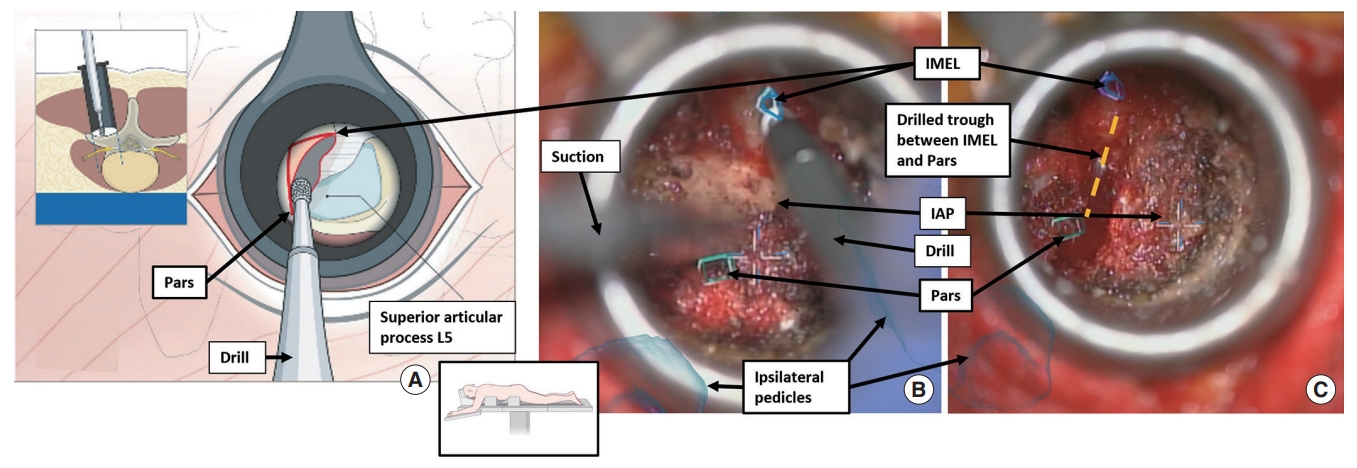
Drilling was always started at the medial border of the inferior lamina since this allows safe and reproducible access into the spinal canal where the dura is generally covered by a thick layer of ligamentum flavum. From here drilling proceeds in a linear fashion cranially and laterally towards the Pars and a trough is prepared (Fig. 7).
More cranial portions of the bone are removed using a 2-mm Kerrison rongeur in order to avoid violating the dura with the drill bit (Midas Rex, Medtronic, Dublin, Ireland). Once the Pars has been disconnected the inferior articular process is harvested (Fig. 8).
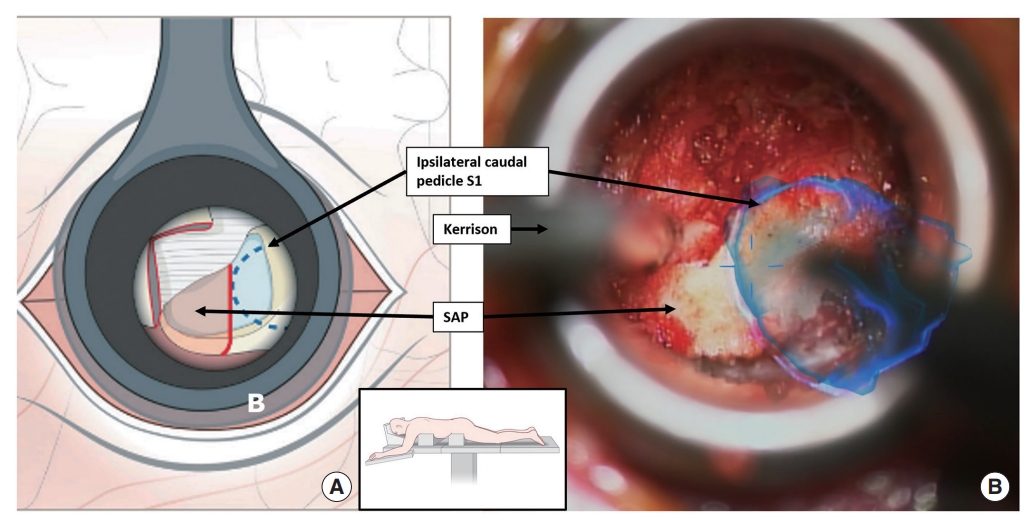
Next, attention is turned towards the upper margin of the ipsilateral pedicle of the inferior vertebra. The pedicle is also highlighted as a landmark and color-coded using AR. The orientation on the pedicle is then used to resect the superior articular process (SAP) of the facet joint by drilling a trough right above the pedicle from medial to lateral and to expose the ligamentum flavum (Fig. 9).
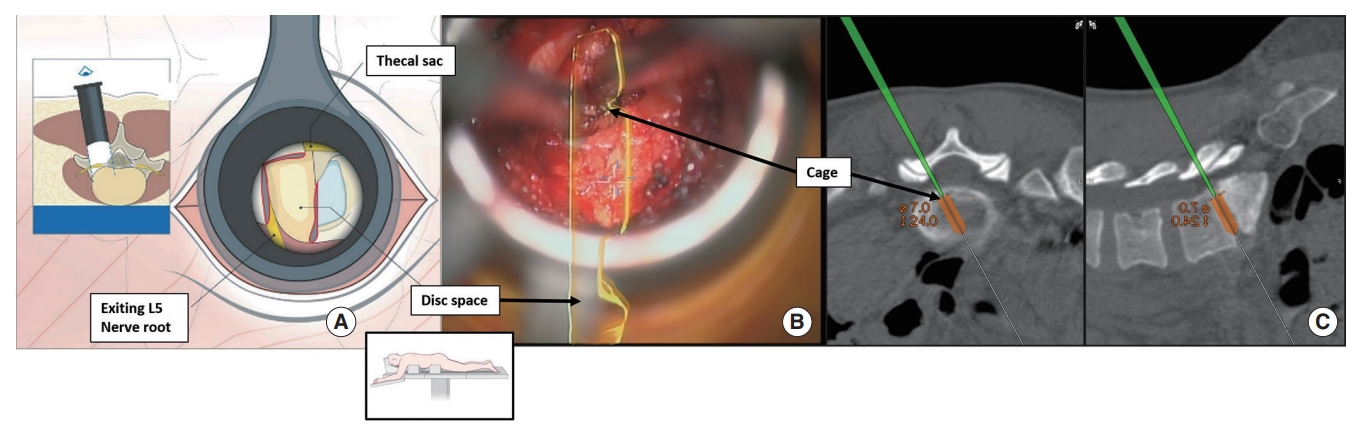
The next landmark shown by AR is the disc space. After resection of the ligamentum flavum, the disc space is exposed and opened (Fig. 10).
Sufficient space was then created by discectomy and the bony endplates were exposed to place an implant. Prior to cage implantation, the optimal trajectory is determined using navigation and autologous bone is placed into the discectomy space. In addition, the autologous bone material harvested from the iliac crest and from the resected facet joint was placed in the cage. The cage is then navigated into optimal position.
After the final placement of the implant, the remaining discectomy cavity was also filled with an autologous bone graft.
If additional decompression is indicated, MIS “over-the-top technique” is performed at this time. For this purpose, the contralateral pedicles of the 2 fused vertebrae are projected into the microscope using AR to facilitate orientation (Fig. 11).
This allowed a better estimation of how far to decompress on the contralateral side avoiding unnecessary destabilization [20].
After fluoroscopic confirmation of implant position, posterior rods are placed. After adequate hemostasis is obtained, closure occurs in a standard fashion.
Postoperatively, patients go to the recovery room followed by the floor following a standard enhanced recovery after surgery protocol.
RESULTS
In total, 10 patients underwent tubular MIS-TLIF with the AR protocol. The cohort included 4 women and 6 men with a mean age of 65.9±9.8. The mean BMI was 28.8±10.5 kg/m2 and the mean ASA physical status classification grade was 2.5±0.5. All cases were single level; 6 involved L4/L5, 2 involved L3/4, one involved L2/L3, and 1 involved L5/S1. In 2 cases (20%) the TLIF was connected to an already existing fusion. In 1 case a resection of a synovial cyst was performed additionally and in 2 cases a MIS laminectomy and decompression of an additional level was performed due to symptomatic central stenosis.
The procedure time from skin incision to closure was 160.6±31.9 minutes on average, (including the procedure time to treat the additional pathology in the 2 cases described above). Operative times in each case is listed in Table 1. The average hospital stay was 2.6±1.0 days. The calibration time of the microscope to the AR was 103±22.2 seconds.
Preoperatively 4 patients reported numbness, 1 patient isolated weakness and 2 patients both. Postoperatively, the neurological exam and wound healing were both monitored at 14 days post operatively. Neurological symptoms improved in all patients. No cerebrospinal fluid leaks, infections, or returns to OR occurred. No patients were readmitted to the hospital for any reason within 90 days. Revision surgery was not necessary in the current follow-up period of 8.4±2.4 months on average.
The evaluated version of the AR software allowed the preoperative planning only on the 2D CT scan slides and not on the 3D reconstructions. In our experience, this required a learning curve to translate the position of the landmarks from 2D to the 3D view through the microscope in the OR. Additionally, 4–5 cases were needed to get familiar with the functions of the AR software. Since this limit, the comparability in our case series, we did not measure the preoperative planning time. The preoperative planning can be done when reviewing the images prior to the surgery and might take a user who is familiar with the workflow and the software less than 10 minutes. In the future, the suggested landmarks may be identified automatically through digital rendering. This function was in the available AR planning software already for different anatomical structures and the automatized rendering of the pedicle outlines worked reliably in our case series. However, advanced degenerative changes (osteophytes, facet arthropathy, severely collapsed disc space) caused inaccuracy of the automatized rendering function and needed manual correction of the outline.
AR was available in all cases at the time of soft tissue preparation. Actual anatomical precision was dependent on the precision of preoperative planning and subsequently matched the precision of the navigation device. Alignment was performed regularly during surgery using exposed anatomic landmarks such as the spinous process. Subjective precision on the part of the surgeon was reported to be < 2 mm. In all cases, the additional guidance by AR was perceived as helpful by the surgeon. A subjective time advantage was assessed as “insignificant” in all cases.
DISCUSSION
AR is a new technology that could improve the workflow of the MIS-TLIF procedure and offers many further potential applications.
AR is currently available in 2 main systems: either on a headmounted display or through integration with the surgical microscope. The 2 systems have different implementations and can be used together. One of the main uses of head-mounted AR displays in spinal surgery are the placement of implants such as pedicle screws [21,22]. Head-mounted AR displays are limited to procedures where no surgical microscope is utilized since current models do not allow significant magnification of the surgical field or seamless introduction of the surgical microscope. When a procedure requires microscopic magnification and illumination (such as in tubular MIS surgery), headmounted displays are limited and therefore microscope-based AR displays are utilized.
Besides these points, this technology has potential for other applications. Examples include resection of tumors and the optimization of workflow for highly standardized procedures such as shown here with TLIF [23,24].
Thereby AR should not be seen as a way to replace the established 3D navigation, it should be considered as an add-on technique for the 3D navigation to improve the intraoperative workflow.
Intraoperatively, this technique could help to identify the correct anatomical landmarks by highlighting them. This could be particularly helpful in MIS techniques with a narrow field of view such as the MIS-TLIF or in patients with severe degenerative changes and difficult anatomical conditions. In a typical MIS-TLIF, a surgeon must verify the location of anatomical landmarks within the surgical field of view using a navigated pointer and 3D navigation. Each time a surgical landmark is verified, the procedure must be paused, and the workflow interrupted. AR could help to improve the workflow of the surgery by highlighting the anatomical structures displayed in the microscope during the procedure removing the need to interrupt the surgery to verify the actual anatomy using a navigated pointer and 3D navigation. Additionally, the increased ease of finding the anatomical landmarks could help in making the surgery less demanding and less fatiguing for the surgeon, thus increasing the comfort for the surgeon and at the same time helping to minimize fatigue-related errors.
AR has other potential applications in areas including surgical education and training. By selectively highlighting relevant structures, complex anatomical constellations could be displayed more clearly, which could facilitate learning and improve the performance of surgeons in training. In addition, critical structures such as nerves or blood vessels could also be highlighted, which enables less experienced surgeons avoid to errors or complications. One other application of AR in surgical training would also be to highlight the next surgical steps by marking the appropriate anatomical landmarks. This allows the surgeon to dedicate additional attention to the actual anatomy and preparation during training. Moreover, the risk of skipping a surgical step is minimized. This contemporary technique when used on anatomical training models, cadavers as well as in live surgery has the potential to facilitate the familiarization of a complex surgical procedure and improve the learning curve. In addition, the existing global digital network would allow this technology to be used in training independent of their physical location, increasing access, and opening up a whole new field of surgical education and training.
Considering our results and the discussion above, there are many arguments in favor of the use of AR and its integration in MIS-TLIF. The planning of the procedure can take place in advance as part of the regular preoperative review of radiological imaging and does not delay the duration of the procedure. In comparison to a TLIF with navigation, the use of AR requires 2 additional steps be integrated into the procedure, the fusion of the preoperative planning CT with the intraoperative navigation CT and the calibration of the microscope to the navigation system. The image fusion is performed directly on the Brainlab Curve, the same hardware used for navigation, eliminating the need for an additional device in the OR. In our evaluation, the duration of the image fusion between the planning CT scan and the intraoperative CT scan was around 5 min although the duration of the image fusion step depends on the data size of the scan and the version of the Brainlab hardware being used. Additionally, the image fusion and calculations involved are performed in a manner that does not interrupt the use of the navigation feature of the device and this led to practically no delay in the surgical procedure. The planning of the surgical approach for the implantation of pedicle screws could take place without limitation, and digital image fusion was performed during the time in which the surgical approach for pedicle screws was performed. The second additional step, and actually the only one to alter the workflow, is the calibration of the microscope to the patient’s position. As described, this requires the microscope to be shortly focused on the patient array and the navigation system is calibrated to the microscope. This step took an average of 103±22 seconds in our evaluation and was not a significant delay in terms of the total operation time. The overall procedure time of a tubular MIS-TLIF in the literature is reported between 138.3±33.3 and 210.6±11.93 minutes. Our case series demonstrated an average procedure time of 160.6±31.9 minutes, suggesting that our AR-integrated workflow does not cause a relevant delay of the procedure [4,25]. However, our current study model does not allow us to determine the impact the use of AR has on duration of MIS-TLIF. The purpose of the current study was to develop an effective protocol for the reproducible application of AR for the MIS-TLIF. A prospective randomized trial, ideally involving multiple surgical centers, needs to be conducted to assess the actual benefit.
When implementing the presented workflow in a new center, our experience estimates a learning curve of around 10 cases to become familiar with the technology, the planning software, and workflow steps, depending on the center’s experience with intraoperative navigation. Since this is the first description of this procedural protocol, it has not been implemented yet in other sites. Teaching hospitals may especially benefit from our workflow for young surgeons in training, in order to better familiarize them with the anatomy given the limited visualization through the MIS approach.
We set out to identify an efficient workflow for MIS-TLIF with AR and assess its practicality and reproducibility. This first attempt was successful. The small size of our cohort limits strength of our conclusions and their generalizability. While we observed encouraging results, larger, multicenter trials will be needed to draw strong conclusions. In addition, AR remains relatively new and is subject to a significant learning curve [26]. The learning curve for AR involves both the planning of the structures on the preoperative CT and the actual use during surgery. In the future automatic identification of landmarks by artificial intelligence could help automatizing the procedure, but the technology not yet advanced enough to provide this capability. Since our results are the first cases operated using our protocol, we were presumably still within the learning curve. For this reason, our results should still be viewed with this limitation. MIS-TLIF also has a significant learning curve however our study surgeon is a highly experienced surgeon using MIS-TLIF technique. It is possible that the benefit of the system is particularly significant for surgeons who are not yet so experienced, since the orientation, which is particularly difficult at the beginning, is facilitated. In order to be able to discuss this in a more differentiated way, studies with a larger number of cases and separate evaluations of surgeons with different levels of experience are necessary; this exceeds the limits of our evaluation.
Another limitation of our study is that comparatively few cases of level L5/S1 were included. In the literature, levels L4/L5 and L5/S1 are reported as the most common levels for TLIF, which probably corresponds to the personal experience of most surgeons [27]. In our case series, level L4/L5 is the most common, however, level L5/S1 is considerably less represented. Given that level L5/S1 is surgically comparatively challenging to operate on, this might have potentially biased the procedure-specific data. We believe this limitation occurred due to the comparatively small sample size of our study. This can facilitate overrepresentation or underrepresentation, as in our case for level L5/S1. However, we believe that the technique we describe could support the surgeon and facilitate orientation during MIS-TLIF cases, particularly for the more challenging level L5/S1. Whether this is actually the case has to be verified in further studies with a larger number of cases.
Additionally, it is technically difficult to evaluate the actual advantage that is provided by AR support. The surgeon’s subjective assessment if AR facilitates the procedure was evaluated by questionnaire after each procedure, but this assessment is only subjective and not objective data. To overcome this limitation various scoring systems were developed from other fields, such as aviation, that attempt to objectify the subjective parameter of workload and mental and physical demand [28]. However, in order to use these scoring systems in a valid manner to quantify the actual advantage of AR, ideally a randomized prospective comparison study with a control group without AR support is should be performed. Additionally, the benefit of the implementation of our workflow for the subgroup of surgeons in training should be evaluated with an own study, since this group may particularly benefit from this technology.
CONCLUSION
AR is a new technology with many promising applications reaching far beyond implant placement in spine. The MIS-TLIF procedure is particularly suitable to be supported by AR, as it is a procedure that is highly reliant on accurately recognizing anatomic landmarks. Our AR protocol for MIS-TLIF shows a possible application of AR to facilitate the workflow. AR implementation can be accomplished in parallel without a delay of the procedure. In the future AI software may be able to automatically identify and mark the relevant landmarks for TLIF.
Additionally, AR offers a new approach for teaching and training of surgeons in spine models and also in live surgery. Since there is a movement towards facilitating teaching and training especially in MISS, AR could potentially gain importance in this field in the future. Future studies should focus on evaluating the efficiency of this technique.